Fattorizzazione LU
Mostreremo come il Metodo di Gauss MEG equivalga a fattorizzare la matrice di partenza nel prodotto di due matrici, . Il vantaggio di questo punto di vista è che posso sfruttare la stessa fattorizzazione per risolvere sistemi con termine noto diverso:
e posso risolvere i due sistemi triangolari con gli algoritmi backward e forward.
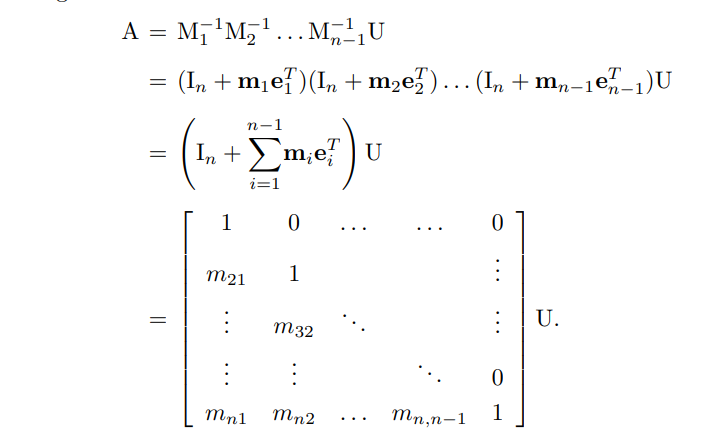
L’osservazione chiave è che possiamo scrivere la nuova matrice come prodotto di una matrice dei moltiplicatori con quella precedente
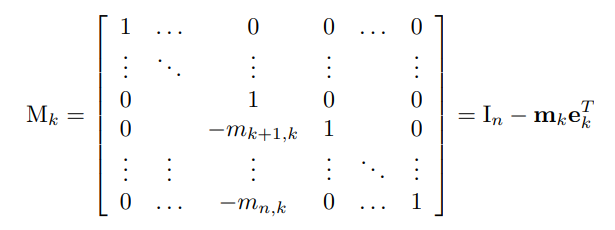
Di conseguenza:
quindi la matrice cercata sarà:
Calcolare le inverse delle matrici è semplice:
Proposizione
Sia . La fattorizzazione con con , esiste ed è unica se e solo se le sottomatrici principali di ordine sono non singolari.
Matrici che soddisfano questo prerequisito sono matrici definite positive
Generalizzazione PA=LU
La fattorizzazione può essere generalizzata cercando, al passo del processo di eliminazione, un elemento pivotale non nullo scorrendo gli elementi della sola sottocolonna. Per tale motivo essa è detta pivotazione parziale (per righe). Un valore grande di (generato ad esempio da un valore piccolo del pivot può amplificare gli eventuali errori di arrotondamento. Per questo motivo si sceglie come elemento pivotale l’elemento di modulo massimo della colonna e la pivotazione parziale viene generalmente operata ad ogni passaggio anche quando non si incontrano elementi pivotali nulli.
Fattorizzazzione LU per matrici a banda
Se la nostra matrice quadrata ha una struttura a banda, ovvero e non nulla solo sulla diagonale e le sottodiagonali e sopradiagonali, è evidente che possiamo solvegere la fattorizzazione in meno ,
Calcolo dell’inversa
Trovare l’inversa di una matrice invertibile equivale a trovare la matrice tale che:
ma questo è equivalente a risolvere sistemi lineari del tipo:
dove è la -esima colonna di . Possiamo risovlere questi sistemi usando la fattorizzazione LU di A, per un costo totale di:
Stabilità
Nel caso con pivoting parziale per righe, scegliendo come pivot l’elementod i modulo massimo, vale il seguente risultato di stabilità:
Inoltre vale per la matrice
dove generalmente è una costante , tuttavia esistono esempi in cui . Questo tipo di stabilità che dipende dalla dimensione viene detta in senso debole.