Sono Modelli microscopici Scale di osservazione, lo stato del sistema è l’insieme delle posizioni e velocita dei veicoli.
“car-following models”
Ipotesi standard: un ordinamento iniziale che si preserva:
Una corsia, non stiamo considerando sorpassi in questo modello.
Focus sul veicolo , il suo leader è il veicolo , il suo follower .
Sono modelli di tipo forza, ovvero definisco la forza sul veicolo in base allo stato microscopico, in questo caso da se stesso e l’interazione con il leader:
Modello follow-the-leader
Pipes 1953, Gazis 1961 Vediamo come è definita :
Notiamo due termini:
- il primo è d’interazione: l’accellerazione diventa positiva se il leader è più veloce, negativa se sono più veloce. Il denominatore ha l’effetto che se sono molto lontano dal leader, subisco poco la sua influenza.
- il secondo termine è detto di rilassamento, il parametro è una velocità desiderata, il tempo di rilassamento (tempo di reazione): è la tendenza a raggiungere la velocità desiderata, indipendentemente dal leader. Nel primo della fila c’è solo questo termine! (Nel caso di condizioni al bordo periodiche sì, es. rotonde).
Optimal velocity model, modello di Bando
Bando, Hasebe et al. 1995
Il termine d’interazione è “inglobato” nel termine di rilassamento. Si deve definire una funzione (funzione della distanza dal leader), sperimentalmente determinata (es tipo sigmoide):
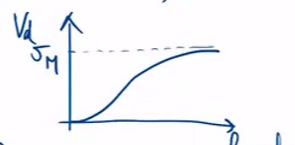 In questo modello la velocità desiderata è dipendente dallo stato del sistema.
In questo modello la velocità desiderata è dipendente dallo stato del sistema.
Si possono combinare i due modelli, mettendo il termine del modello di Bando al postom del termine di rilassamento nel modello FTL, modello chiamato FTL-OVM, FTL-Bando.
Domande di ricerca
- Come scegliere ? come questa scelta influenza la stabilità nel traffico? Utile per auto a guida autonoma.
- modelli con interazioni non locali
- studiare effetti di ritardo
- studiare modelli multi-lane, multi-classe